O Coding Set permite programar cunha serie de fichas que, situadas na superficie do «panel de control», será lido pola cámara da «torre de mando» e transmitido ao robot «matatabot», para que o execute.
.
Creando programas (códigos):
Para crear un programa deberemos empregar as diferentes fichas dispoñibles, cada unha cunha «instrucción diferente», colocalas no «panel de control» e premer o gran botón de «executar» de cor laranxa.
As fichas dispoñibles son as seguintes:
Tódolos códigos deben comezar coa ficha de «inicio de loop/secuencia» e rematar coa ficha «fin de secuencia», podendo poñer no medio as instrucións que queiramos.
Por exemplo neste código o «matabot» bailará, posto que é a única instrución que hai dentro da secuencia.
Os códigos poden ocupar máis dunha liña, ou calquera lugar dentro do «panel de control» (de esquerda a dereita), xa que «leerá» a ficha de comezo da secuencia e a ficha de fin da mesma.
Neste caso o código ocupa dúas liñas e é executado na súa totalidade.
Cada instrución pode ter «pegado» un número que indicará ben o número de veces que se excutará a instrución ou no caso do «baile» ou «música», a que corresponda a cada número (existen 5 músicas e 5 bailes diferentes, un por número).
Se no lugar do número escollemos a ficha do «dado», usará un número aleatorio (entre 1 e 5) cada vez que se execute.
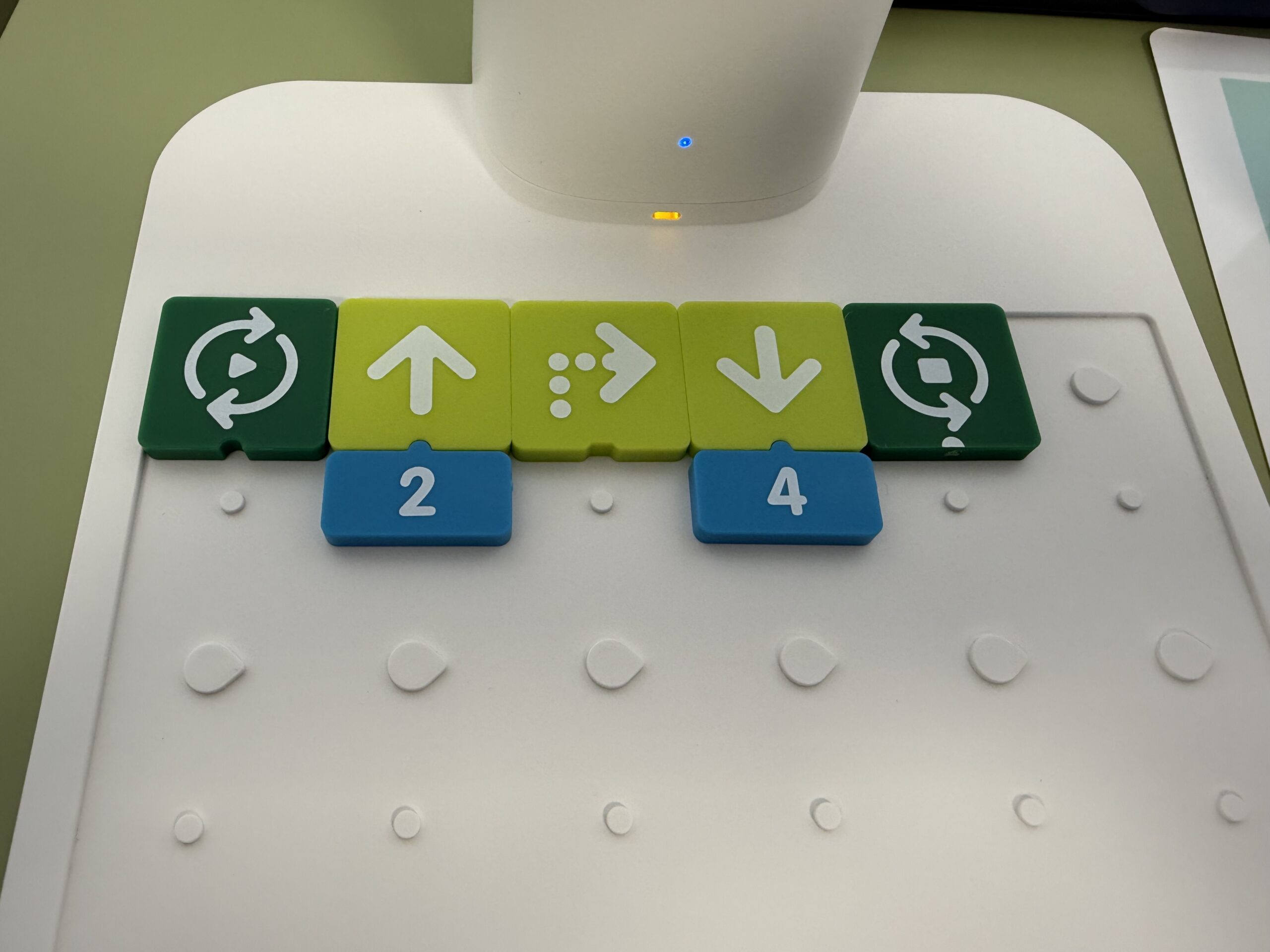
No seguinte caso caso o código executa «dous pasos para adiante», un xiro e «4 pasos para atrás»
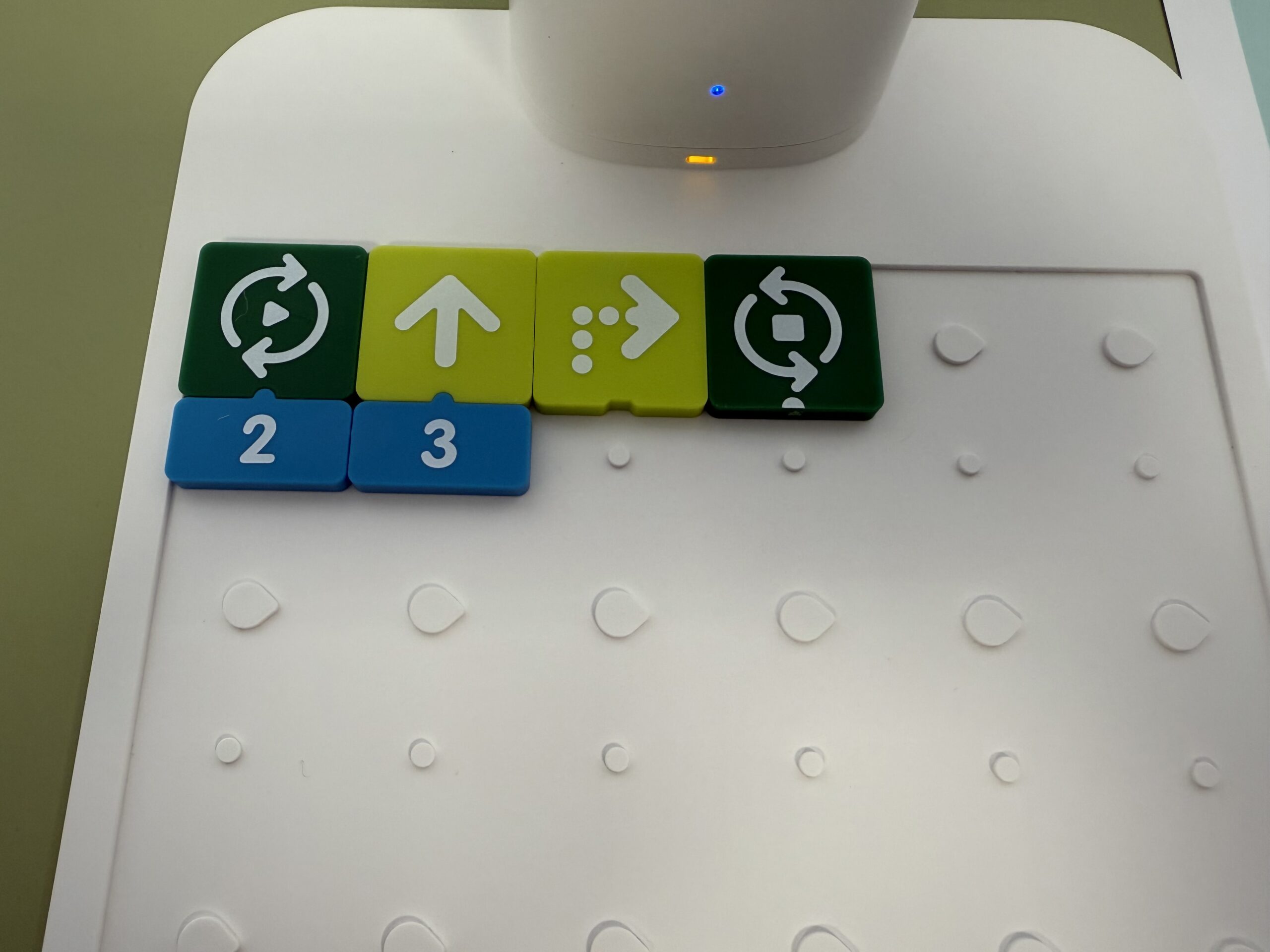
Se pegamos o número ao comezo da secuencia, esta será repetida tantas veces como se sinale. Así no seguinte código, repite 2 ves a secuencia «anda 3 pasos para adiante e xira á dereita».
Tamén podemos facer unha «función», é dicir unha parte do código usando a tecla amarela «fn» e creando o código a continuación (neste caso atrás tres veces). Na secuencia principal, onde insertemos a ficha da funcnión, executará ditas accións.
Así neste sonará unha música e camiña tres cara atrás (a función), antes de rematar.
Se o código non pode ser lido, porque está mal creado, escoitaremos un son avisando, e non será executado.
.
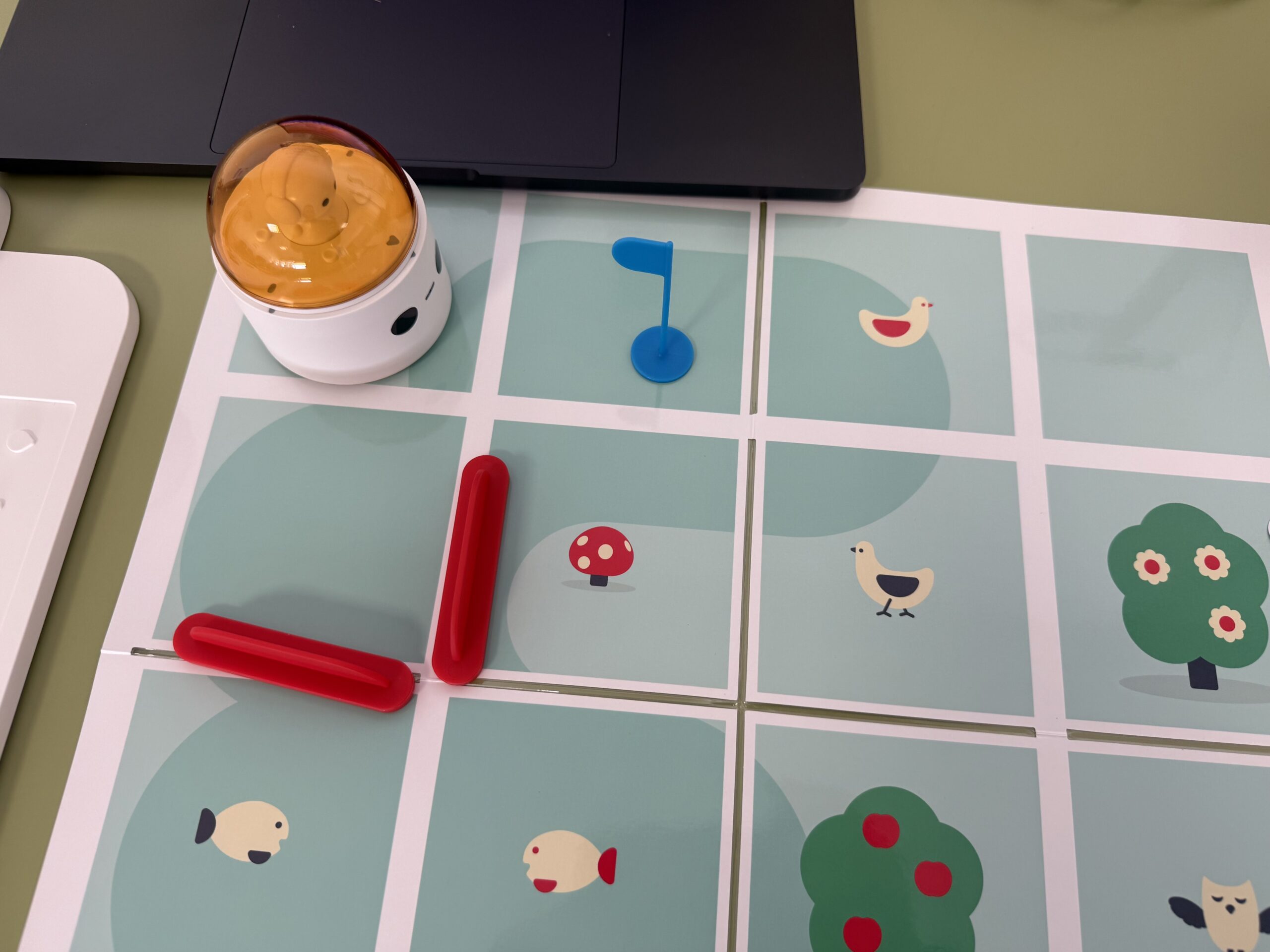
Plano e desprazamentos:
Na caixa do «Coding set» inclúese un plano para desplazamentos, acompañado de barreiras e bandeiras.
O «matatabot» desprazase en «saltos» de 10 cm, que é o tamaño que ten a grella usada de plano.
Tamén o acompaña unha serie de libros «con retos», para usar co plano que se adxunta (as dúas caras do mesmo).
.
Carga e acendido/apagado:
Para cargar tanto a torre como o robot, deberemos conectalos co cable usb-c a un adaptador de corriente ou a un ordenador.
Para acendelos e apagalos deberemos manter pulsados, os respectivos botóns durante uns segundos.
O robot VinciBot permite executar un programa creado no software «Matatacode (Vinci), que é unha versión modificada do programa «Scratch».
Con el poderemos facer que o robot: avance, retroceda, xire, detecte sons, detecte luz, siga liñas e detecte cores na superficie, faga sonar música ou sons, cambiar a pantalla frontal co debuxo que se queira, cambiar a cor dos leds…
O código pode executarse premendo no boton «play» do software ou directamente nalgúns dos botóns físicos que ten o robot.
Podemos executar os programas en tempo real, ou ben cargarlle o programa para que quede «gardado dentro del» e o execute, sen precisar do programa Matatacode
..
Descargar o software Matatacode:
Podes descargar o software Matatacode (Vinci), para poder programar o vincibot, desde a web oficial, na seguinte ligazón:
Está dispoñible para ordenadores con sistema operativo Windows, MacOS; así como para dispositivos móbiles (teléfonos/tabletas) on Android ou iOS.
No caso te tabletas (incluídos os paneis interactivos en modo Android), deberemos buscar a app «vincibot».
..
Programando con Matatacode (vincibot)
Se usamos un ordenador, Matacode debe executarse no navegador «Chrome«, e así o avisa cando se executa, no caso de que non estea posto por defecto dito navegador, no teu ordenador, deberás copiar a «url» que se xera no navegador que se abriu e copialo en «chrome».
Outra opciones é usar a url en chrome http://localhost:xxxxx reeemplazando as «x» polo número de porto que veremos ao abrir a aplicación.
Se usamos a aplicación instalada nunha tableta, smartphone ou panel interactivo (en modo Android), tan só deberemos executar a aplicación e autorizar os permisos que aparezan
.
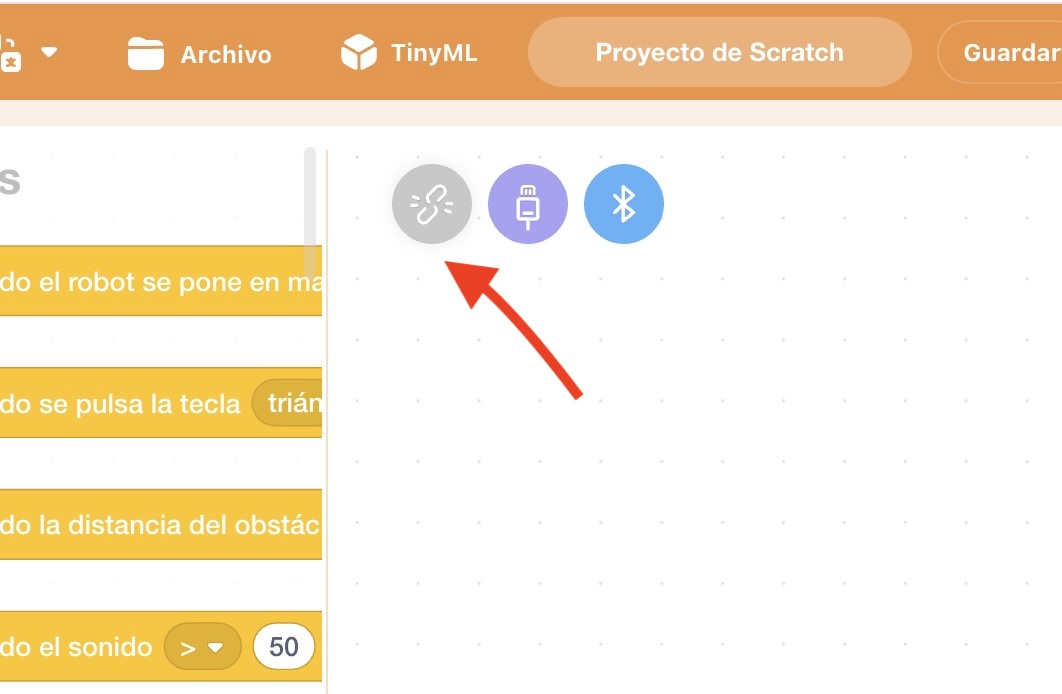
1 – Conectar o robot:
O primeiro paso será conectar o robot para que poida «pasárselle o código» e mesmo manexalo en tempo real desde o sowftware.
Podemos elixir entre conectalo por cable (se se usa ordenador) ou por bluetooth, escollendo a opción desexada, despois de premer no botón de conexión.
Se se emprega desde unha tablet a conexión será por bluetooth sempre.
.
2 – Crear o programa en «Matatacode»
O robot debe programarse co software Matacode (unha versión de Scratch), arrastrando instrucións da esquerda á dereita (e para eliminalas da dereita á esquerda).
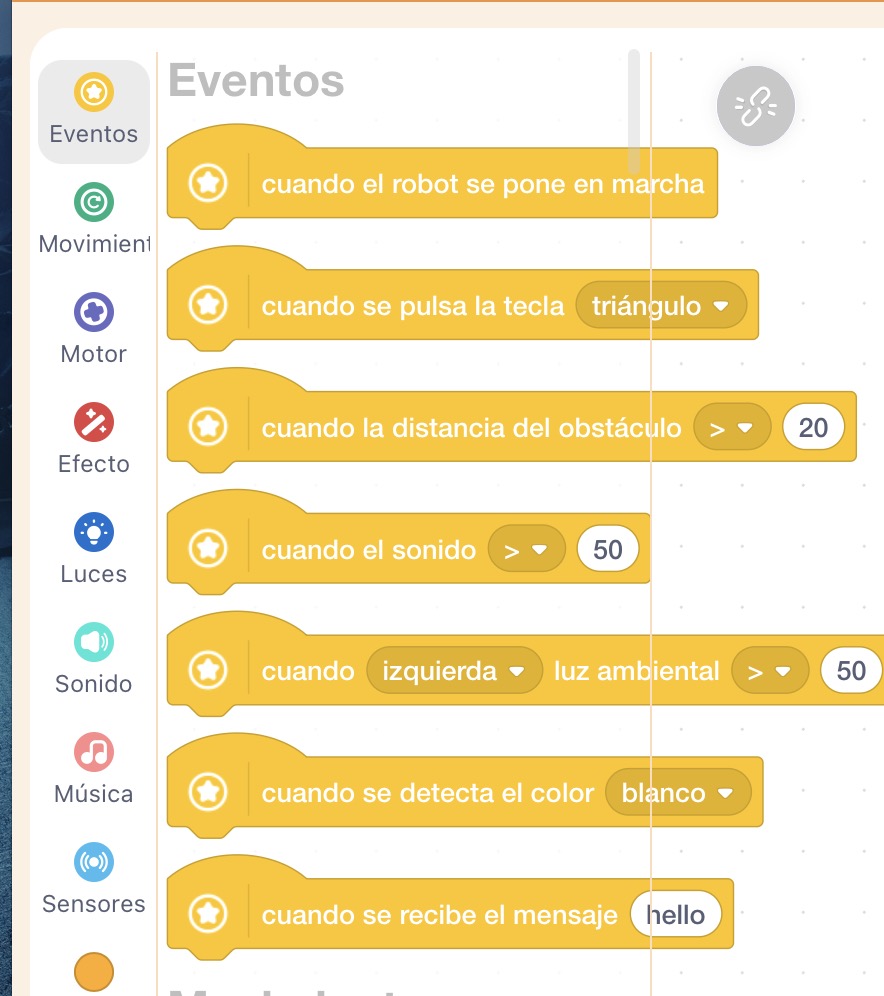
2.1 – Como iniciar o código?: Eventos de comezo de código
Usando os bloques da «eventos» podemos escoller como iniciar o código, o resto de instrucións quedarán «encaixadas debaixo del». Poden empregarse tantos bloques de «evento» como se queira, pera ter diferentes formas de «iniciar un código».
Eventos
Esesdsfas
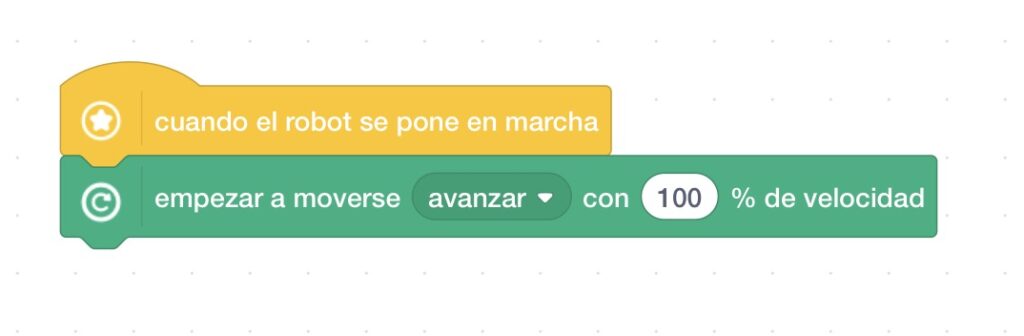
Evento: «cuando el robot se pone en marcha»
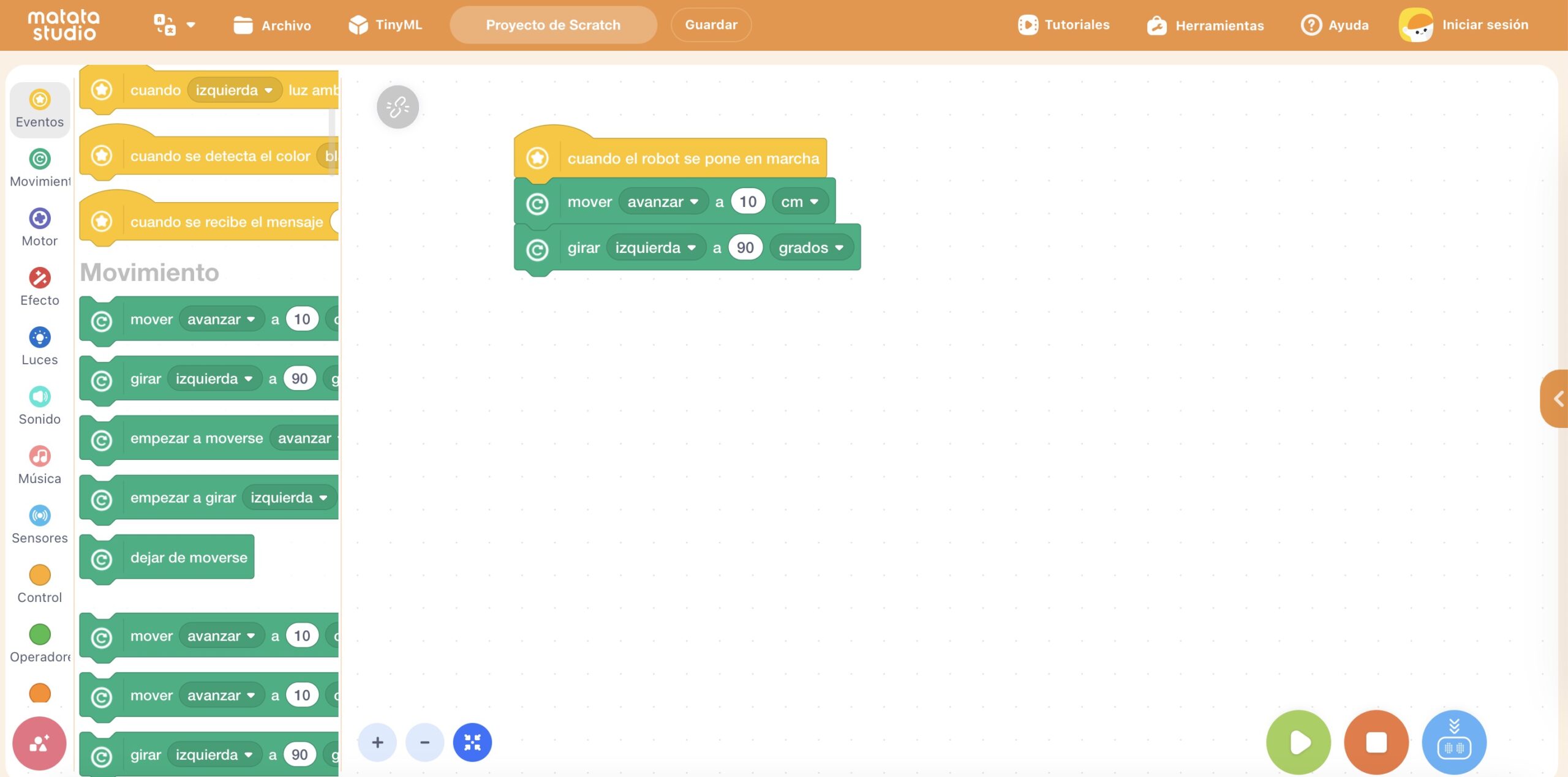
Unha vez teñamos o código prememos o botón «play» de cor verde na esquina inferior dereita ou «stop» de cor veremella, que está ao seu lado.
Na columna da esquerda, identificado por iconas de cores, temos os diferentes bloques coas instrucións. Tan só deberemos arrastralos da esquerda á dereita para configurar o teu programa.
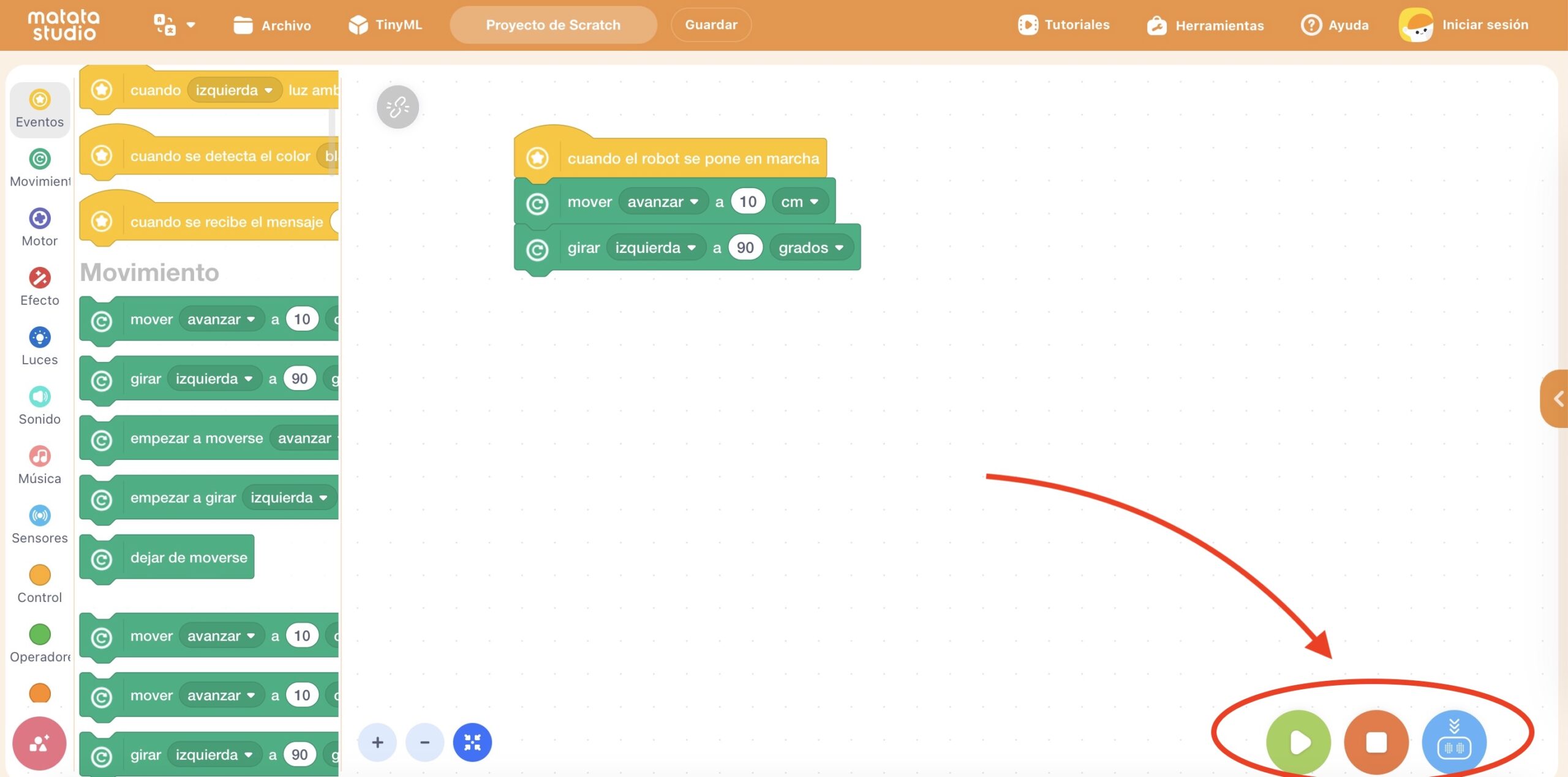
Unha vez creado podemos premer algúns dos botóns da parte inferior dereita:
Premer o botón «stop» para deter o programa en tempo real.
Premer o botón «play» e excutar o programa en tempo real.
Premer o botón «cargar» o programa dentro do robot, de modo que se execute sen ter o program aberto.
…
Esesdsfas
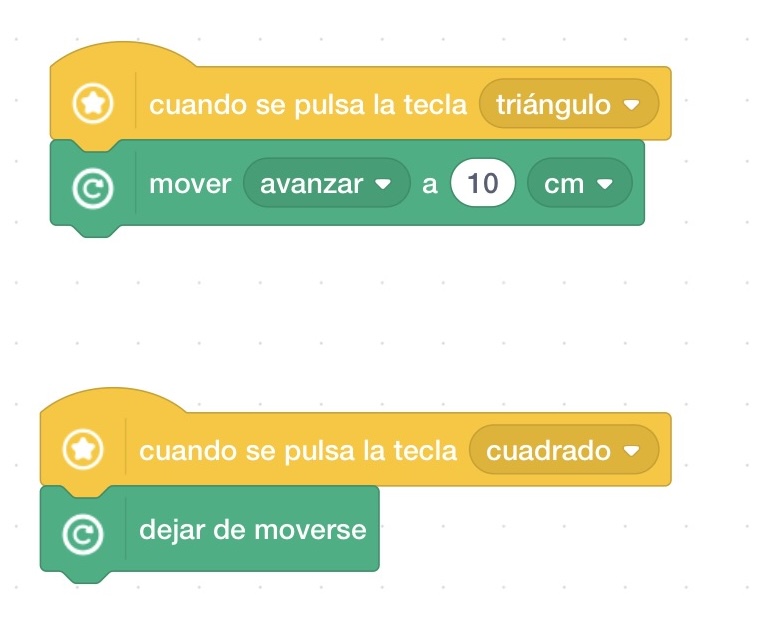
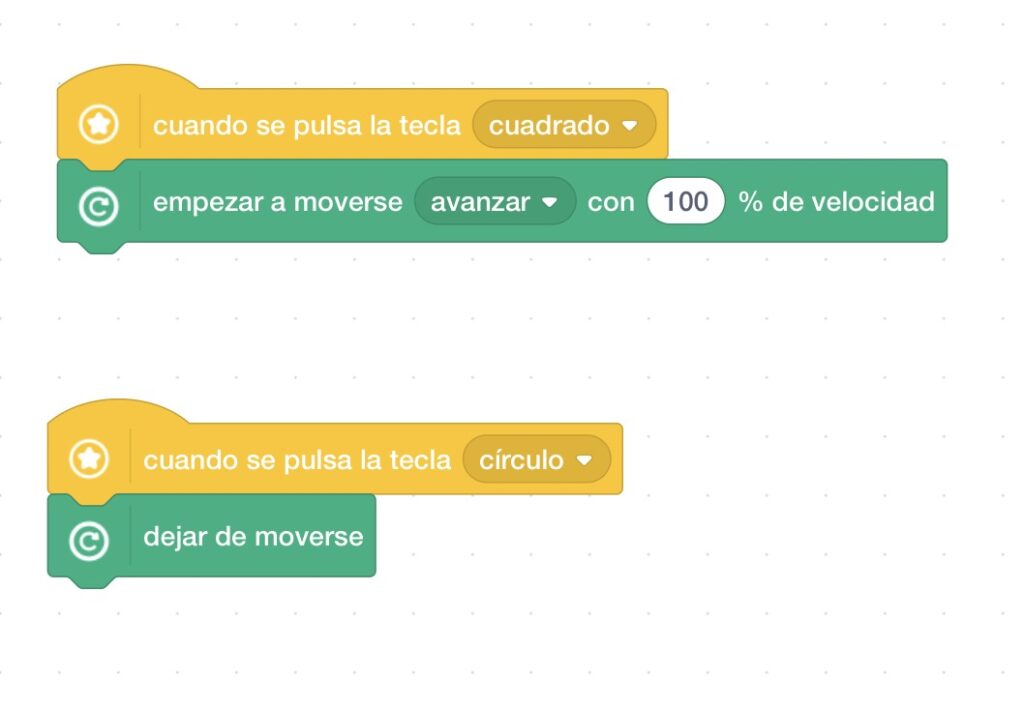
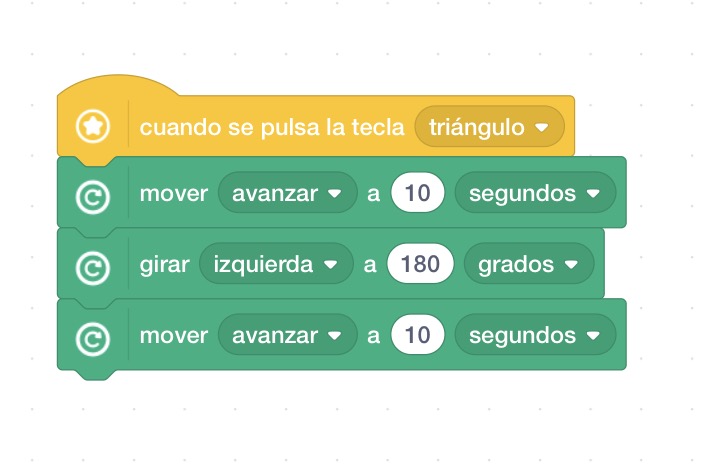
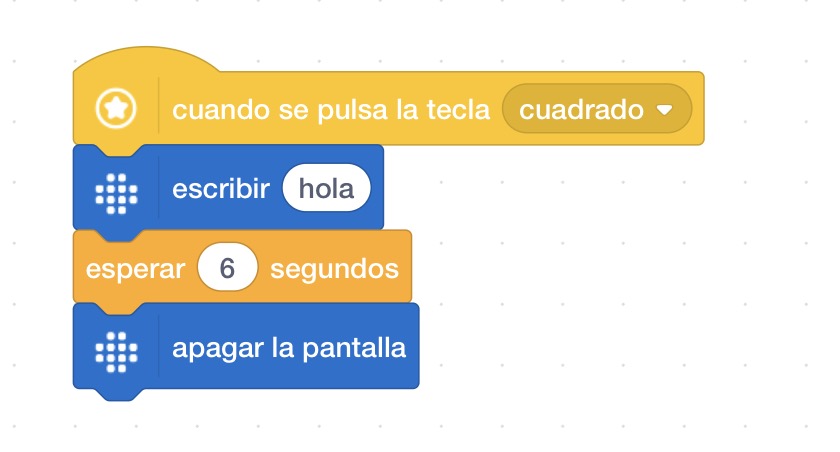
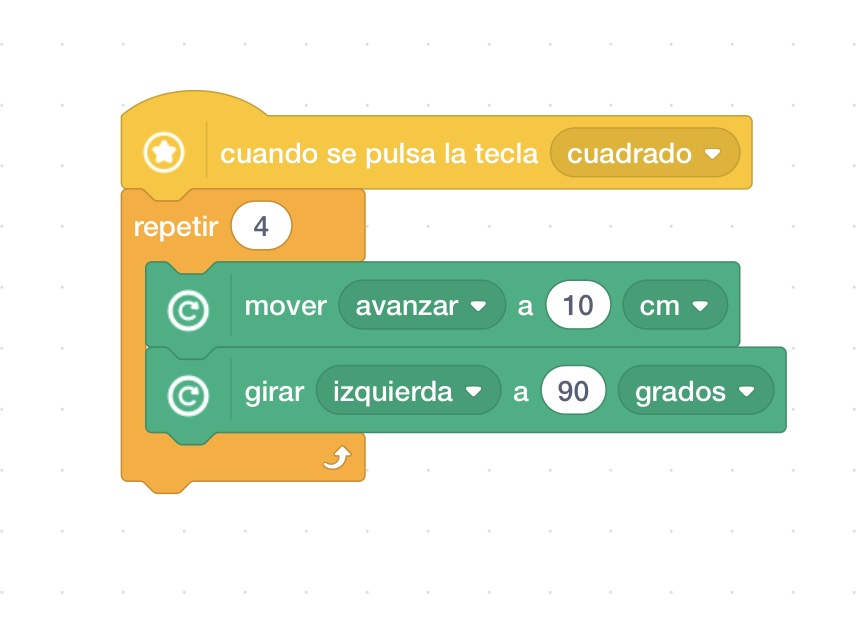
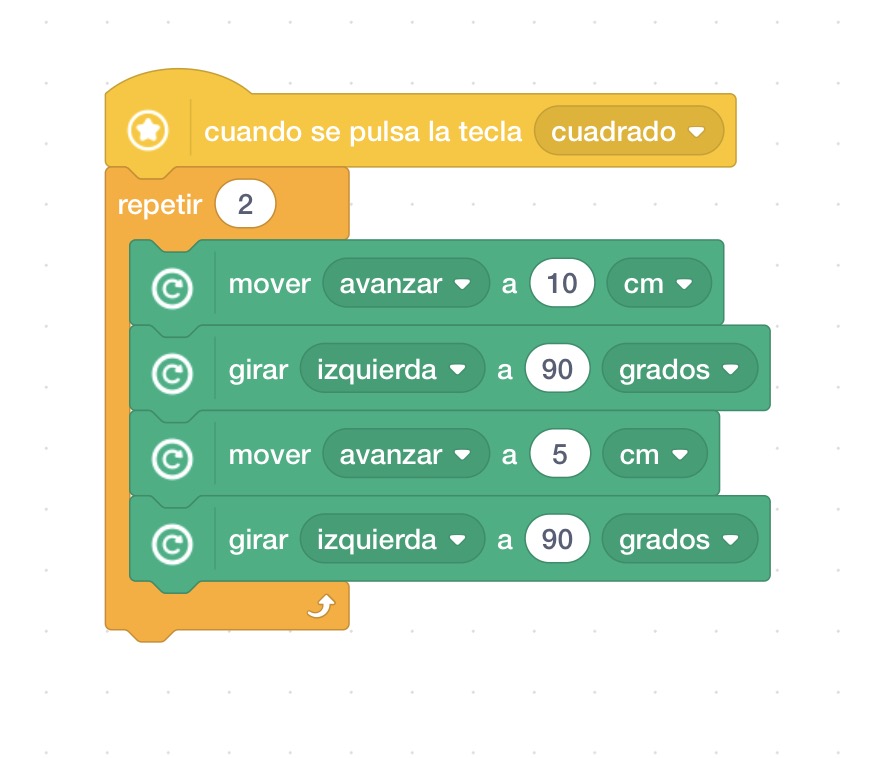
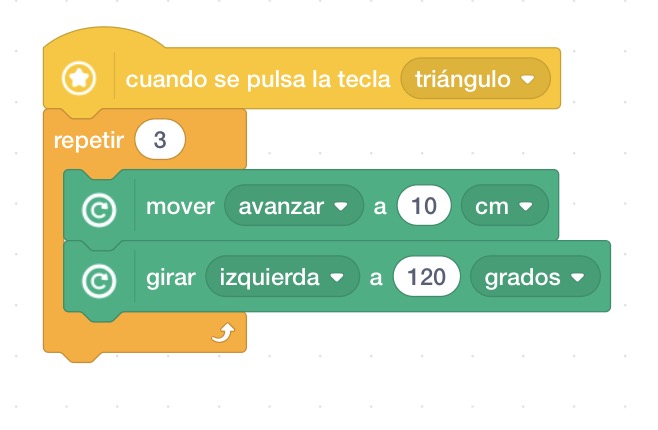
Evento: «Cuando se pulsa la tecla (triángulo/círcuo/cuadrado»
Neste caso o código execútase cando se preme on os botóns «físicos do vincibot» con forma de cadrado, círculo ou triángulo, segundo se indique.
Neste caso temos dous eventos con dous código simultáneos.
O resto dos «eventos» fucionan do mesmo xeito, indican cando debe comezar a executarse o código que indiquemos.
Sempre podemos «gardar» o proxecto co código, poñéndolle o nome que queiramos.
Esesdsfas
Códigos de exemplo de «retos»:
De seguido atoparás varios códigos con retos que se poden plantexar ao alumnado, con diferente nivel de dificulatade, tómaos como exemplos, para crear os teus propios retos.
Movementosbásicos:
Facer que se mova cando se preme o «botón play» do programa.
Facer que se mova premendo un botón (cadrado) e que se deteña ao premer outro botón (círculo)
Facer que avance durante 10 segundos, de media volta é volva ao lugar de orixe.
No despregable podes escoller cm/segundos/pulgadas
Na pantalla:
Facer que alterne entre dúas caras, da pantalla frontal, «guiñando un ollo».
Neste caso engadimos medio segundo entre cambio, para que se vexa mellor o efecto.
Facer que escriba un texto na pantalla, agarde uns segundos amosándoo e logo o faga desaparecer
Figuras xeométricas:
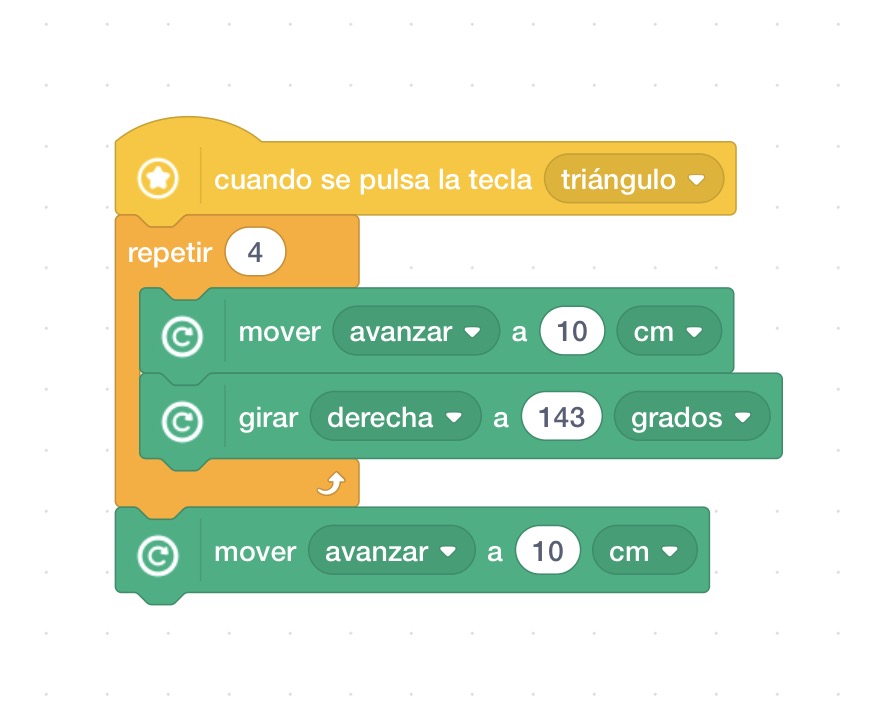
Trazar un cadrado co robot.
Se metemos un rotulador polo orificio do robot, veremos o trazo debuxado.
Trazar un rectángulo co robot.
Se metemos un rotulador polo orificio do robot, veremos o trazo debuxado.
Trazar un triángulo co robot.
Se metemos un rotulador polo orificio do robot, veremos o trazo debuxado.
Trazar unha estrela con liñas interiores co robot
Se metemos un rotulador polo orificio do robot, veremos o trazo debuxado.
Creado por dúas das asistentes ao curso «Pensamento computacional e robótica básica» – CFR Pontevedra – novembro 2025
Trazar unha estrela sen liñas interiores co robot
Se metemos un rotulador polo orificio do robot, veremos o trazo debuxado.
Creado por unha das asistentes nunha docencia no CEIP de Nantes – xaneiro 2026
Sensores:
Facer que se mova cando «escoite» un son forte, por exemplo unha palmada
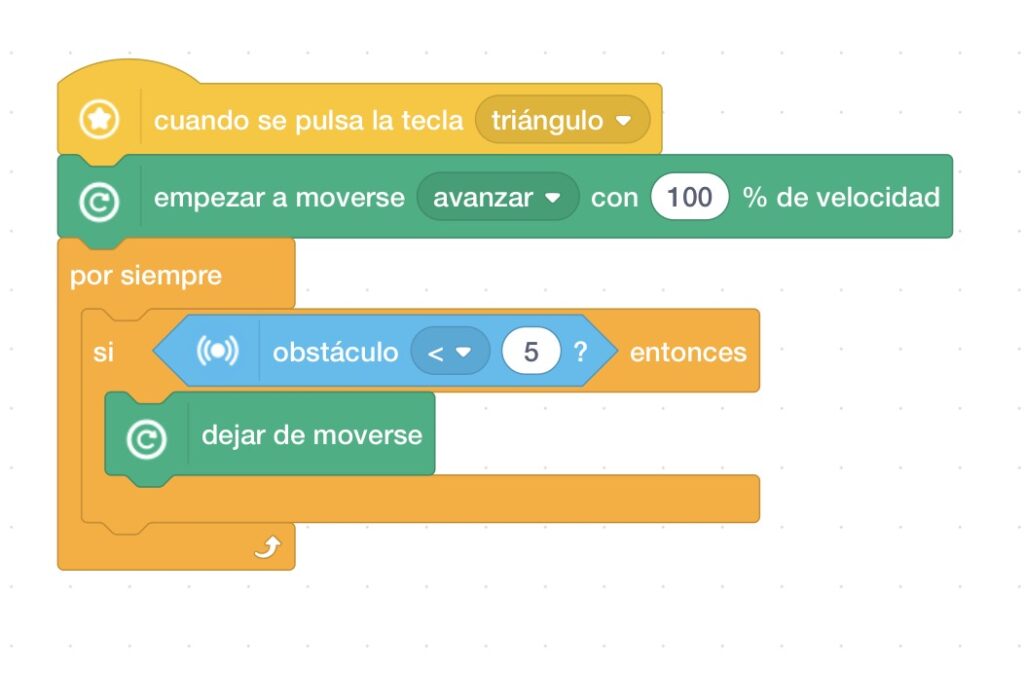
Facer que se mova premendo un botón (triángulo) e que se deteña só cando se atope cun obstáculo.
Neste caso é importante usar «por sempre» para que «mire» constantemente.
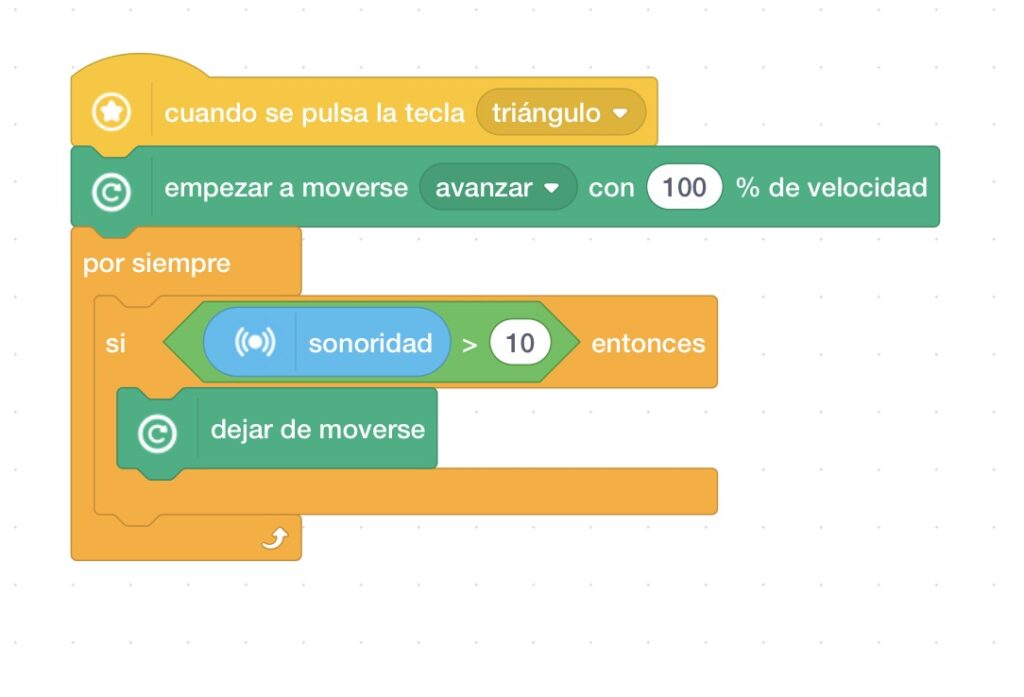
Facer que se mova cando se prema un botón e se deteña cando escoite un son forte (por exemplo unha palmada)
Neste caso é importante usar «por sempre» para que «escoite» constantemente.
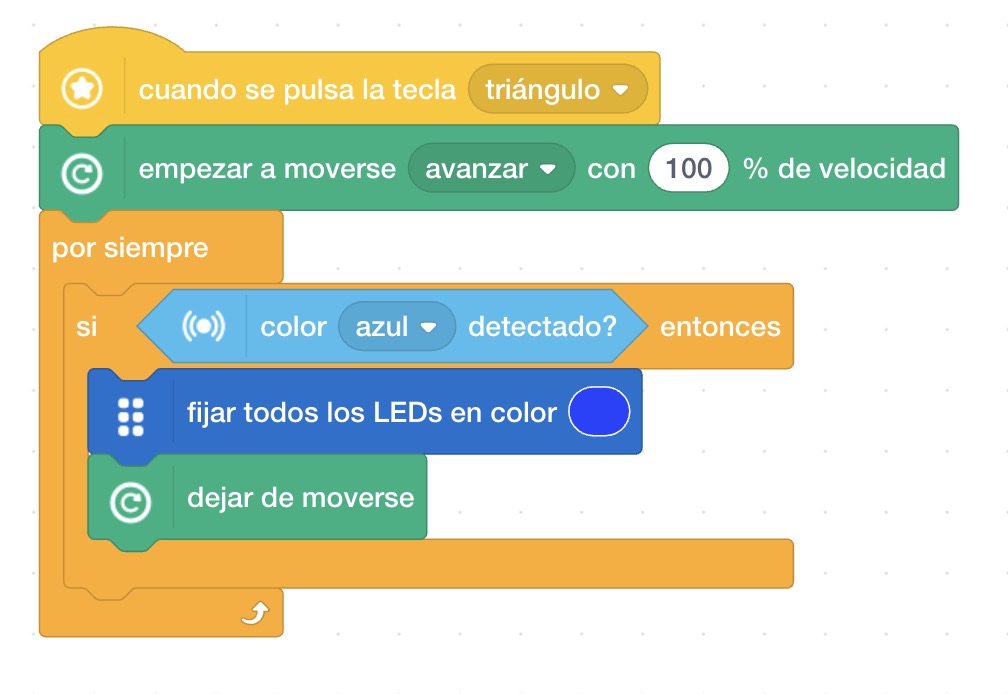
Facer que se mova e cando pase por riba da cor azul, que se deteña e acenda tódolos leds de cor azul.
Neste caso é importante usar «por sempre» para que «o sensor debaixo do robot» constantemente.
Leds superiores:
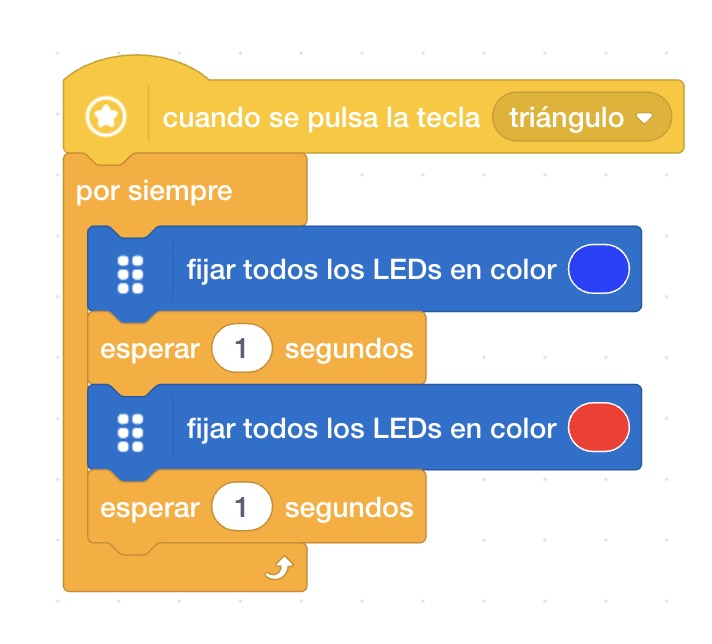
Facer que alterne tódolos leds superiores de azul a vermello.
Neste caso engadimos un segundo entre o cambio de leds, para que se vexa mellor o efecto.
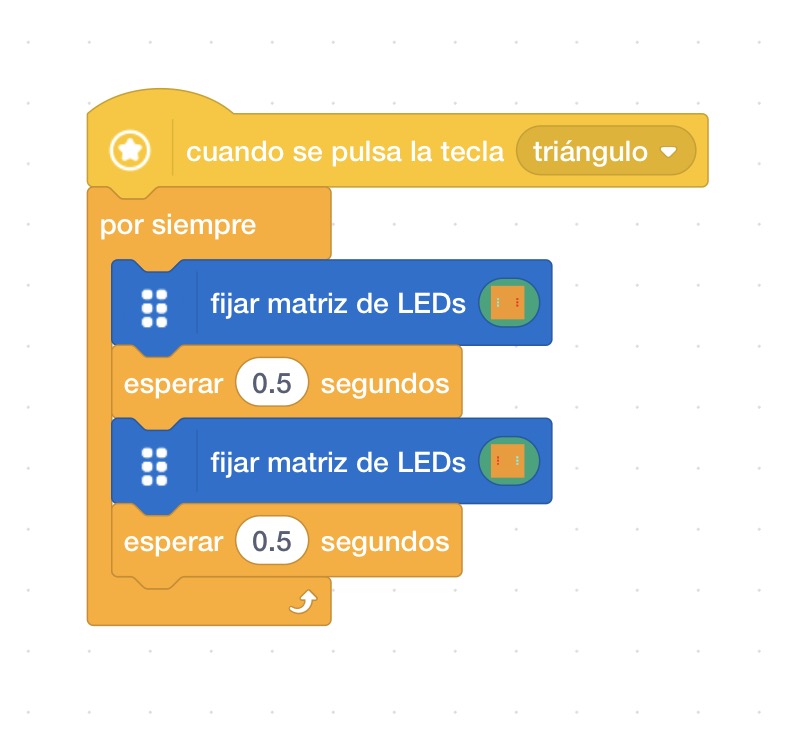
Facer que cambie as cores dos leds como as luces dunha ambulancia. A fila da esquerda en vermello e da dereita en azul, e viceversa.
Neste caso engadimos medio segundo entre o cambio de leds, para que se vexa mellor o efecto.
Combinados:
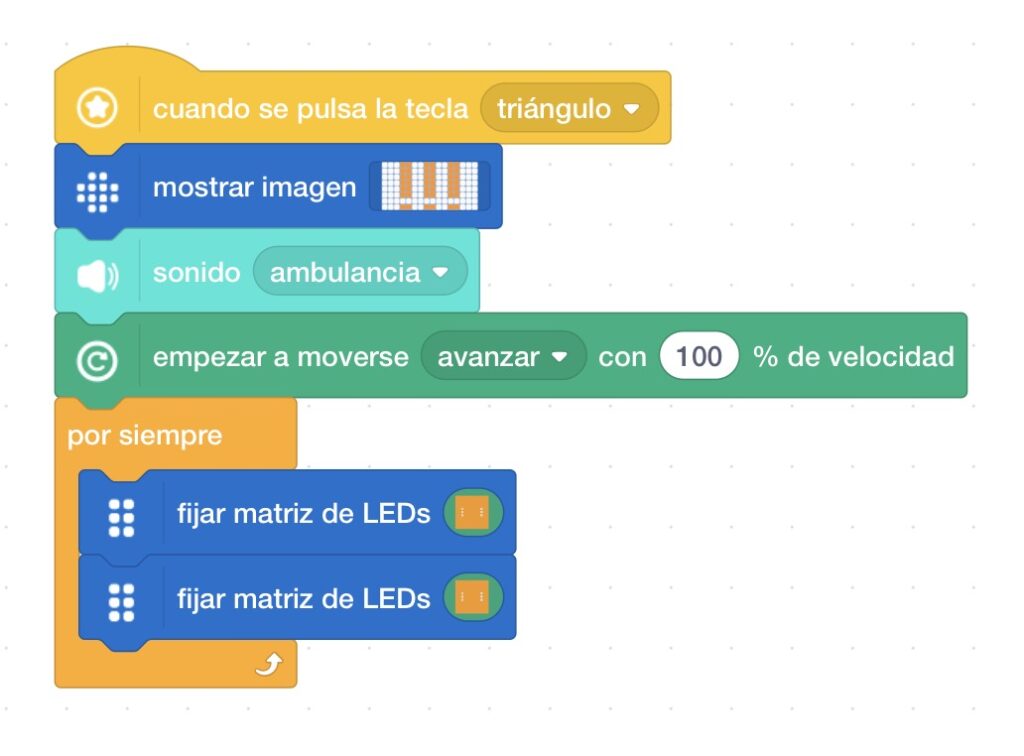
Crear unha ambulancia que se mova cambiando os leds superiores, soando como tal e amosando algo na cara visible.
Facer que antes de trazar o cadrado, «mire se hai alguén» 😉, e cando remate que baile.
Esesdsfas
Titoriais dentro da aplicación:
Dentro da propia aplicación, temos unha serie de titoriais (en inglés) onde tamén se inclúen códigos, para o uso dos diferentes sensores se bloques.
Trátase dun kit que Inclúe un robot (Photon) que poderemos programar como calquera outro, empregando un software específico, que se explica posteriormente; pero incluíndo tamén a opción de «entrenar a robot para que recoñeza certas tarxetas» (incluídas no kit), de modo que esteamos a entrenar unha Intelixencia Artificial.
O kit inclúe ademais do robot unha serie de elementos para ser empregados como «Intelixencia artificial» co seu entrenamento previo, todos eles empregados nos dous intinerarios impresos que incorpora o kit.
A finalidade do robot, ademáis da súa programación é «coñecer como funciona a intelixencia artificial» simulando que o estamos a «entrenar» para que recoñeza certos elementos. (tal como sucedería cunha IA real)
.
Usando a aplicación Photon Edu
As indicacións aquí publicadas refírense á aplicación «Photon Edu», para o kit indicado, se ben están dispoñibles outras dúas, que se indican ao final desta publicación.
Serven para manexar o robot «con independencia de que veñan o non co Kit de Intelixencia Artificial» (para a parte de Intelixencia artificial existe outra aplicación que se sinala a continaación).
Cando accedemos á aplicación deberemos escoller se entramos como «docente», ou como «alumno/a». Podermos ter creado un usuario e acceder con el, para ter almacenados os sosos progresos, traballos, etc…
Prememos conectar para comunicarnos co robot (asegurándonos de que se atope acendido)
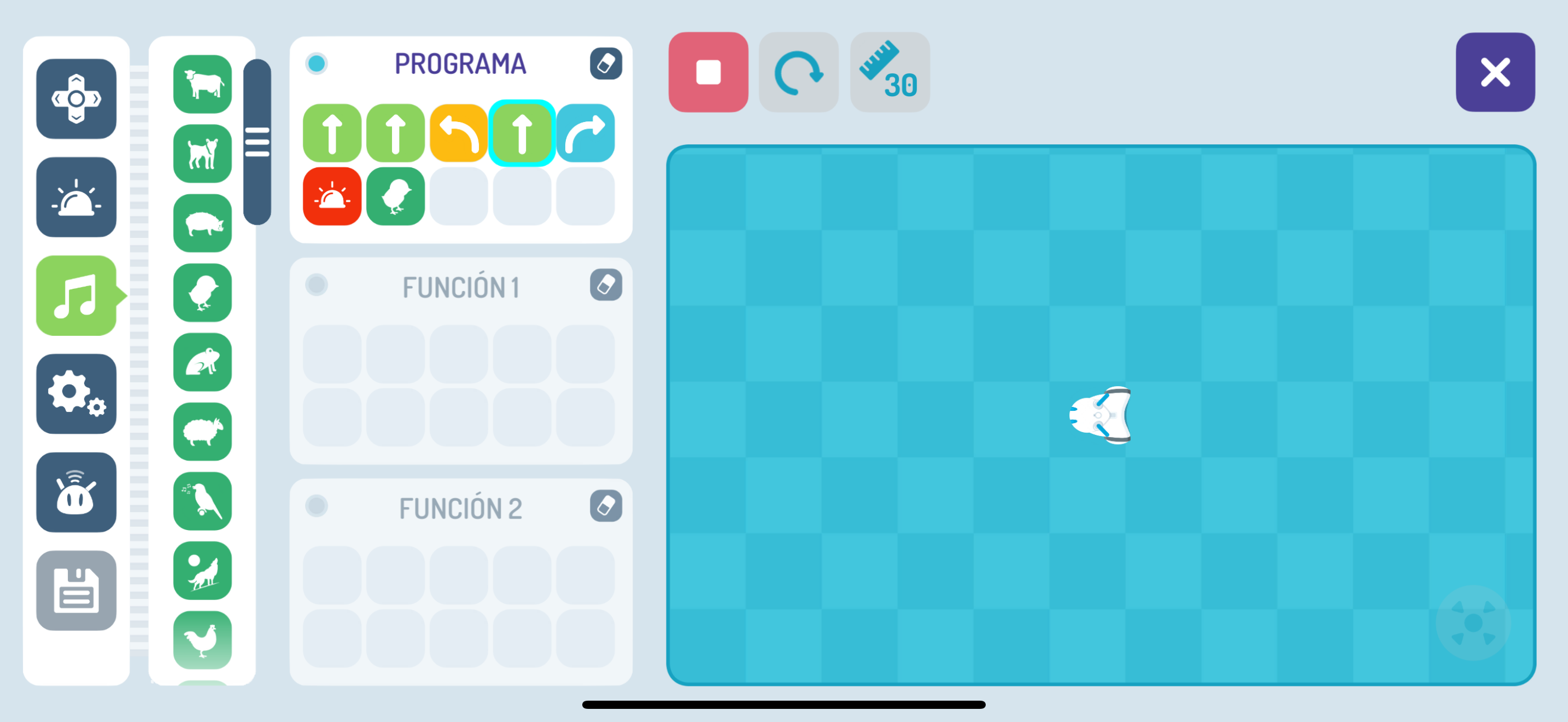
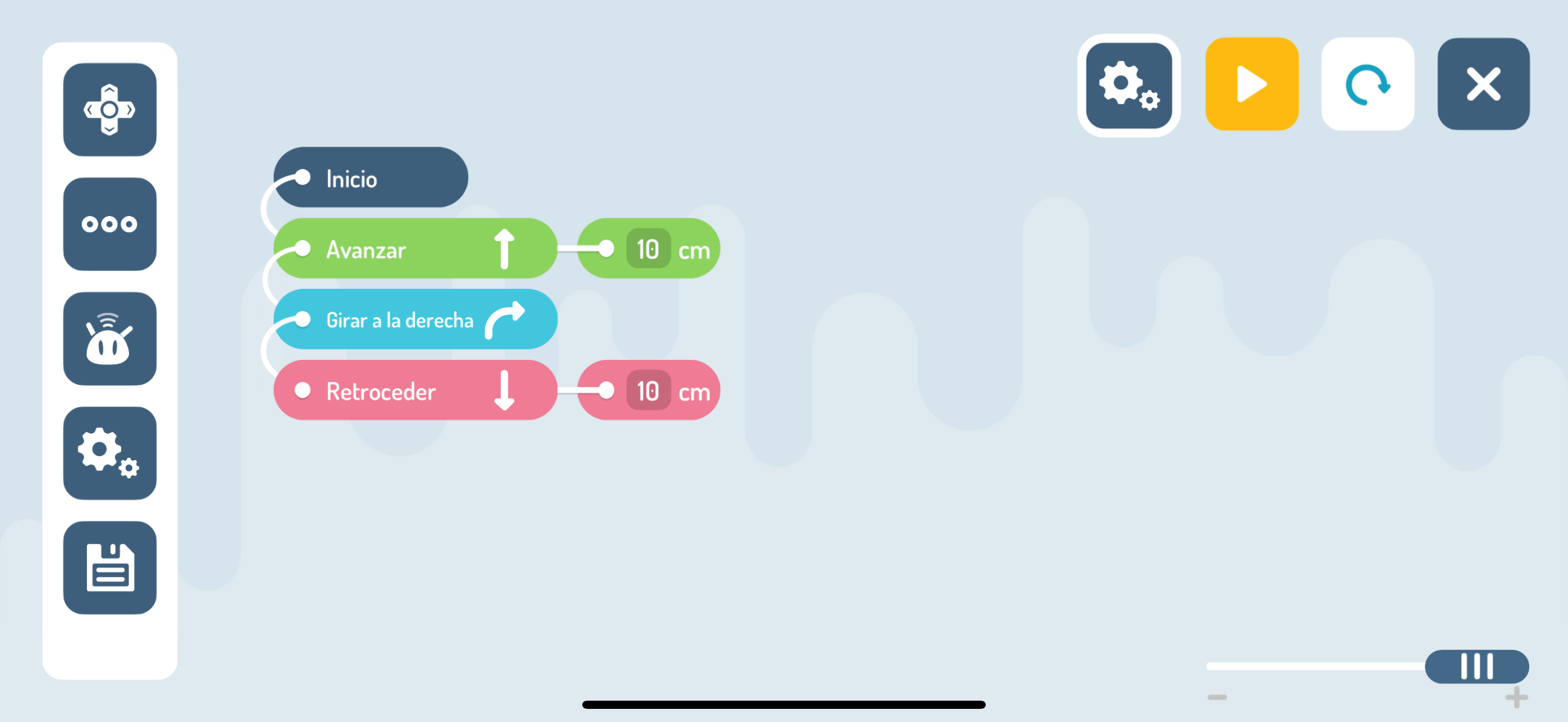
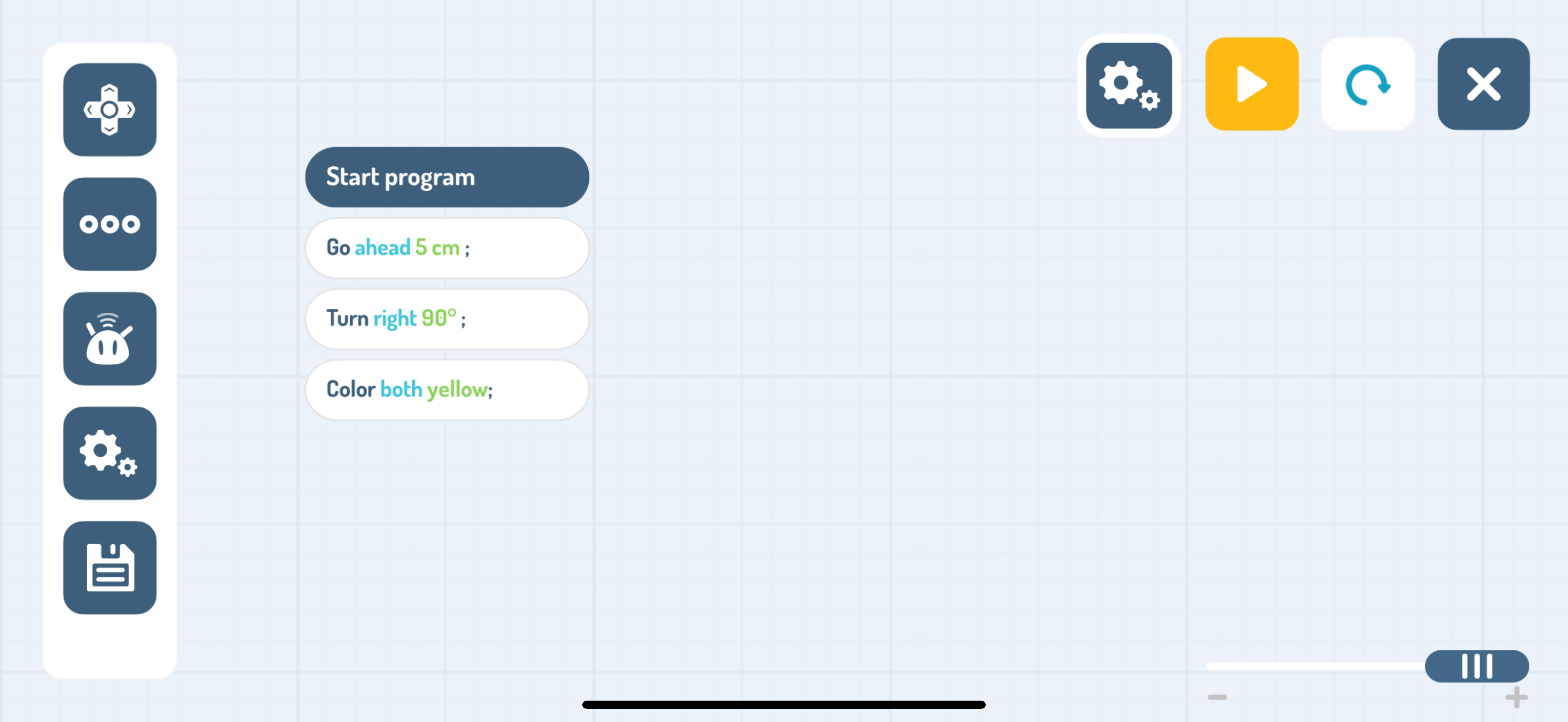
Poderemos escoller na aplicación catro tipo de «actividades»:
a) Aprendizaxe interdisciplinario
b) Programando: Permite programar o robot destas formas (de menor a maior dificultade):
Draw: programa o robot debuxando o recorrido co dedo, e arrastrando ao camiño as «funcións» que queremos que faga
Badge: programa o robot empregando símbolos, que deben arrastrarse na orde en que se executen.
Blocks: Programa o robot empregando bloques coas diferentes instrucións, que iremos arrastrando para compoñer o código a executar.
Code: Programa o robot empregando instrucións ou códigos escritos que temos que arrastrar na orde en que queiramos que se execute.
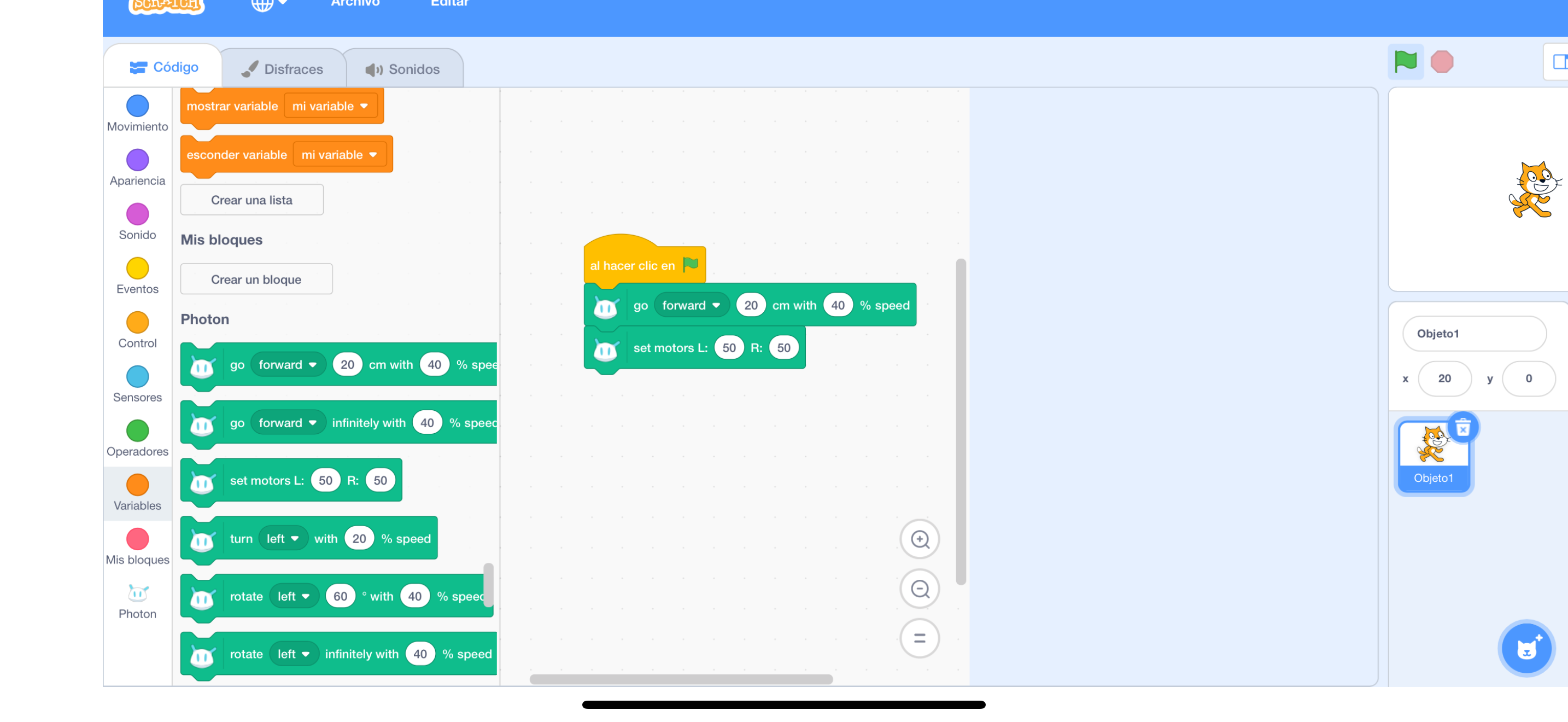
Scratch: programa o robot empregando Scratch e usando o bloque de códigos específicos de Photon (abaixo de todo)
c) Guións de leccións ABC: Para empregar leccións creadas na plataforma educativa Photon.education/lessons_plans. Introducindo o código de cada unha accederemos a ela.
d) Programas preparados: inclúe unha serie de programas «xa preparados», para que o alumno/a os modifique e execute directamente no robot.
.uisando os
Usando a aplicacion Photon AI:
Mentras que coa aplicación antes indicada (Photon Edu) podíamos programar os movementos e accións do robot, coa applicación Photon AI (que podes descargar en Google Play ou na App Store), levarás a cabo o traballo de «entrenamento» da intelixencia artificial do robot.
Con este entrenamento poderá recoñecer elementos no tapete (tarxetas do kit) e actuar segundo o programamemos.
Cando entremos, e conectemos o robot, deberemos escoller o itinerario co que estamos a traballar (ver seguinte punto) e actividade de «aprendizaxe da IA» en concreto.
Pedirá que respostemos a unha serie de preguntas de modo que «ensinemos ao robot» a través delas. Técnicamente o «alumno/a» e que está «ensinando ao robot» ao responder as preguntas que se presentan na aplicación que se corresponden coas diferentes tarxetas» e, «parece» que se está entrenando ao robot para que as recoñeza despois. (tal como sucedería cunha IA real)
En todo caso, nos dous itinerarios ven detallado, paso o paso o que deberemos facer en cada actividade proposta.
.uisando os
Usando os 2 itinerarios do kit:
O kit inclúe dous «itinerarios impresos» deseñados para diferentes idades, nos cales se emprega todo o material incorporados no kit de IA: tapete da cidade, tarxetas de diferentes tipos…
Cada itinerario conta con lecións deseñadas para ir afondando en diferentes aspectos da robótica e Intelixencia Artificial.
O robot poderá ler «as sinais» e elementos que poñamos no tapete (coas tarxetas correspondentes) e actuar segundo o que tivermos indicado no programa. Pero «antes terán que entrenar ao robot para que os recoñeza», tal como sucede coa Intelixencia Artificial.
.
3apps para manexalo
1 app para entrenar a IA
Ten en conta:
Para usar estes programas cun ordenador precisarás mercar o «Pothon Magic Dongle», un «adaptador usb» que conectado ao equipo permite comunicarse so robot, pero para usalo con tablets ou teléfonos podemos facelo descargando a app directamente desde Google play ou desde a APP Store
Se vas usalo cun ordenador:
Terás que programar o robot a aplicación «Photon Magic Bridge» para windows e Mac, que inclue «Photon Edu», «Photon Coding» e «Photon Robot». Podes descargala na seguinte ligazón: https://photon.education/magic-bridge-download/
A aplicación «Photon Magic Bridge» (coas 3 aplicacións que contén) tamén pode empregarase na súa versión online, usando un navegador web (agás Safari), sen ter que descargala, podes facelo na seguinte ligazón .https://magicbridge.photon.education
Se vas a usalo cunha tablet ou teléfono:
Tes que empregar unha das tres aplicacións para programar o robot «Photon Edu», «Photon Robot» ou «Photon Coding«; e a aplicación «Photon AI» para o entrenamento da Intelixencia artificial. Están dispoñibles para Android e iOS, podes buscalas en Google Play e na App Store. Deberás instalas de modo independiente.
.
Photon Edu:
Coa aplicación EDU, podes controlar as accións do robot en clases interdisciplinares e impartir clases sobre os conceptos básicos da programación. A aplicación tamén permite acceder a programas preparados que podes iniciar cun só clic, así como a ferramentas e materiais útiles para a ensinanza, incluíndo escenarios de lección e unha guía de inicio rápido sobre como traballar co robot. Ademais, a aplicación permite que profesores e estudantes configuren e utilicen contas separadas. Só se pode conectar á aplicación a versión educativa dos robots.
Esta aplicación ensina aos estudantes a usar, programar e controlar o robot. Podes usalo en grupos máis grandes ou durante clases individuais. Ofrece máis de 200 desafíos creativos baseados na historia do robot Photon que se estrelou na Terra.
Na aplicación Photon Coding, todas as funcións están desbloqueadas e dispoñibles desde o principio. Os nenos/as que teñan unha comprensión máis profunda da aplicación Photon Robot ou que non queiran usar as interfaces sinxelas porque coñecen os conceptos básicos da programación poden usar a interface Photon Coding para desenvolver a súa paixón e programar o robot como queiran. Esta aplicación é recomendada para usuarios domésticos.
Ambos robots comparten características e funcionalidades, polo que as propostas feitas para un poden se empregados cando se use o outro.
No noso caso, as propostas realizáronse para usar co Beebot, pero poden ser empregadas perfectamente co robot E.a.R.L.2
En ámbolos dous robots a programación realízase usando os botóns da parte superior que permiten:
Avanzar 15 cm (frecha cara adiante)
Retroceder 15 cm (frecha cara atrás)
Xirar 90º á dereita (frecha á dereita)
Xirar 90º á esquerda (frecha á esquerda)
Introducir unha pausa (pausa)
Deter o código / borrar o código (aspa – equis)
Acender os leds (só E.a.R.L.2)
Emitir un son (só E.a.R.L.2)
Ambos contan con alfombras e outra serie de complementos á venda, para que o robot se desplace por eles.
No caso das propostas feitas aquí, que podes ver de seguido para o Beebot (pero de uso para ambos), son todas de creación propia, sen necesitar mercar ningún elemento adcional.
…
Só dispoñible para o E.a.R.L.2:
No E.a.R.L2 podemos cambiar os son por defecto por outros que quieramos en formato mp3, tan só hai que conectalo por cable usb aun ordenador e reemplazar, cos mesmos nomes de arquivos, o contido do cartafol «ZH» (fai unha copia dos arquivos orixinais para poder usalos novamente cando queiras, xa que reemplazarán cos novos que subas)
O E.a.R.L.2 tamén pode ser programado empregando o sofware «Scratch» conectándoo co cable usb a un un ordenador. Seguir as instruccións indicadas no manual de usuario, de xeito que aparezan as funcións en «máis bloques».
Pode complementarse o E.a.R.L.2 co uso dunha APP que, coa alfombra que venden inclúe Realidade Aumentada.
Pode tamén programarse o robot True True usando unha versión especial deScratch, un software libre de programación para nenos e nenas, deseñada para este robot.
Lembra que só funcionará con esta versión «adaptada de scratch», chamada «truebot Scratch», non coa versión convencional de Scratch. O truebot Scratch está só dispoñible para windows.
Cadernos de actividades:
Cadernos de actividades (para mercar) na web de Compubot:
Tamén existen unha serie de cadernos con actividades, elaborados por Compubot, con propostas xa deseñadas para usar o TrueTrue.
Podes atopalos, para mercar, nas seguinte ligazóns á tendas online:
Unha vez creado un programa, co miibot apagado deberemos contectar o cable usb ó ordenador para enviar o programa, non funcion de forma inarámica nin en tempo real (a diferencia do Lego wedo ou o M-bot por exemplo).
Prememos a icona do play «verde» e agardamos a que se cargue o programa.
Desconectamos o cable e encendemos o Miibot, o programa comeza a executarse.
Podemos tamén facer ese pasos co cable conectado, en canto premamos o «play verde» executarase o programa (coa limitación do estar conectado ao cable)
O miiBot é compatible coas pezas orixinais de Lego (por exemplo as de wedo), polo que poden empregarse na súa construción e deseño de robots diferentes, empregando a placa de microbit, os motores e os sensores.
Desde xeito, unha vez realizado o primeiro montaxe, o alumnado pode redeseñalo, ou deseñalo novamente para crear robots diferentes.
En todo caso, ó empregar a mesma placa, motores e sensores, a programación con crumble é a mesma.
Ten en conta que este kit «Nezha Inventor’s» non contén a placa «micro:bit» que permite o seu funcionamento, senón que é un kit de sensores e pezas para construír un robot, no que introducir a placa «micro:bit».
É a placa micro:bit a que se pode programar para que o robot execute accións.
Deberemos engadir a extensión «nezha» para poder usar o Nezha inventor’s kit coa placa micro:bit en MakeCode, posto que poderemos así usar motores, que non veñen por defecto na placa micro:bit.
Segundo o sensor que queiramos usar teremos que engadir outras extensións diferentes (como «PlanetX» para as luces e outros sensores). Consulta cada un dos proxectos, do apartado anterior, para coñecer a extensión que se teñen que engadir.
Farémolo deste xeito, buscando a extensión que sexa necesario en cada caso.
Micro:BIT é unna pequena tarxeta programable, cun custo asequible, incorpora gran cantidade de sensores e actuadores, que pode programarse co software MakeCode (Open Source)
Como conecto a placa micro:bit para «cargar » nela o código creado en makecode?
Podes crear o código en MakeCode e observar o resultado no simulador da esquerda, pero deberás cargar o código creado na placa micro:bit, para usalo realmente e, por exemplo, executar as accións no Netzha Inventor’s kit. No seguinte vídeo explícase como conectar a placa micro:bit ao ordenador e cargar nela o código:
Podemos usar a opción de «conectar o dispositivo» e ao premer en «descargar subirá o programa». (Non dispoñible en tódolos sistemas operativos ou configuracións)
Tamén podemos «descargar o arquivo hex» co programa, no botón descargar e copialo (arrastrando) dentro da micro:bit (que aparecerá como un «dispositivo usb como os pen-drive». Dispoñible sempre.
Como podes observar se non é recoñecida a placa para poder «conectarse a ela», o botón descargar permite «obter o arquivo hex» para cargar na placa.
O mBot é robot educativo creado por Makeblock, pensado para o traballo nas aulas coa robótica educativa. Está baseado naprogramación por bloques de Scratch, empregando unha versión modificada do Scratch chamada «Mblock»
Existen dúas versións do mBot:
mBot versión 1:
Pode programarse co sofware Mblock 4, Mblock 5 ou Mblock online
…
mBot versión 2:
Pode programarse co sofware Mblock 5 ou Mblock online
Se ben ambas versións comparten o software MBlock para a súa programación, cada unha ten as súas particularidades. Consulta as seccións específicas de cada un no menú superior de navegación.
Podes mercar os mBot, sensores, mBuilds (para mBot2) e estructuras en:
Para poder manexar e programar o mBot precisaremos empregar o software M-block, unha adatapción do entorno de programación para estudiantes Scratch.
Este sofware conta con varias versións:
mBblock 4
mBblock 5 online (que é a mesma que programalo desde a páxina web https://ide.mblock.cc/)
Tamén podemos programar o Mbot directamente desde a páxina web https://ide.mblock.cc.
Este sofware (nas súas dúas versións) ven xa incluído, baixo a categoría programación, nos equipos Edixgal ou con maqueta Abalar. Ten en conta que o mBot 2 só pode programarse coa versión do Mblock 5 denominada «online»
Podes atopar as ligazóns de descargar o programa, se o precisas, ou usar versión online do mesmo na seguinte web:
Esta web usa cookies para su funcionamiento, única y exclusivamente, si continúas navegando aceptas que sean almacenadas. Esta web usa cookies para o seu funcionamento, única e exclusivamente, se continúas a navegar aceptas que se sexan almacenadas.



















.png)